Nghiên cứu thiết kế, chế tạo và thử nghiệm phổ kế siêu cao tần băng L và payload quang học trong dải nhìn thấy, hồng ngoại gần tương thích với thiết bị bay không người lái (UAV) phục vụ nghiên cứu viễn thám
- Chi tiết
- Được đăng ngày Thứ ba, 21 Tháng 9 2021 08:38
| Mã đề tài | VT-CN.03/17-20 | |||||||
| Hướng nghiên cứu | Công nghệ vũ trụ | |||||||
| Chủ nhiệm đề tài | ThS. Nguyễn Văn Hiệu | |||||||
| Cơ quan chủ trì | Viện công Nghệ vũ trụ, Viện Hàn lâm Khoa học và Công nghệ Việt nam | |||||||
| Thời gian | 2017-2020 | |||||||
| Mục tiêu đề tài | - Làm chủ công nghệ chế tạo thiết bị gắn cảm biến đặt trên UAV, từng bước làm chủ công nghệ viễn thám ở Việt Nam. - Nghiên cứu, thiết kế chế tạo payload quang học dải nhìn thấy và hồng ngoại gần đặt trên máy bay không người lái (UAV) có các dải bước sóng trùng với các vệ tinh quan sát trái đất của Việt nam như: VNREDSAT-1, ... - Thiết kế, chế tạo phổ kế siêu cao tần băng L có khối lượng và kích thước nhỏ gọn, gắn được trên thiết bị bay. - Phân tích, xử lý tín hiệu hệ phổ kế siêu cao tần băng L trong nghiên cứu, tính toán độ ẩm đất. - Xây dựng mô hình tính độ ẩm đất phù hợp, trợ giúp công tác giám sát, quản lý phục vụ nông nghiệp. - Đào tạo, xây dựng phát triển đội ngũ cán bộ của viện Hàn lâm KH&CN Việt Nam và từng bước phát triển các payload đặt trên vệ tinh của Việt Nam. |
|||||||
| Kết quả đạt được |
1. Thiết kế và chế tạo payload quang học dải nhìn thấy và hồng ngoại gần
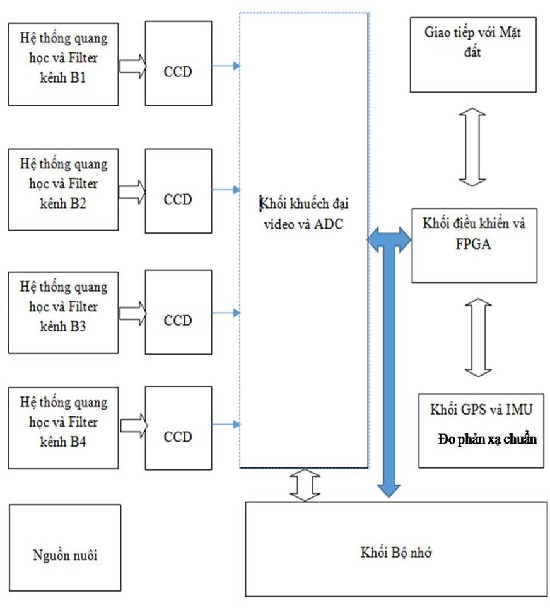
Sơ đồ khối trong Hình 1 đã minh họa các khối chức năng cụ thể trong hệ thống quang học và điện tử của payload. Hệ thống quang học sẽ bao gồm bốn ống kính và bốn kính lọc tương ứng với bốn dải phổ khác nhau. Hệ thống điện tử bao gồm bốn khối CCD, bốn khối khuếch đại, bốn khối ADC, một khối điều khiển trung tâm, một khối nguồn nuôi, một khối bộ nhớ, một khối giao tiếp với mặt đất và một khối GPS & IMU, đo phản xạ chuẩn.
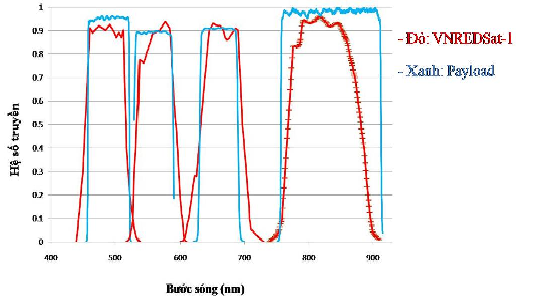
Một đồ thị được xây dựng để minh họa phổ truyền qua kính lọc trong payload được nghiên cứu và trong vệ tinh VNREDSat-1 (xem Hình 2). Kết quả cho thấy độ trùng khớp giữa hai phổ.
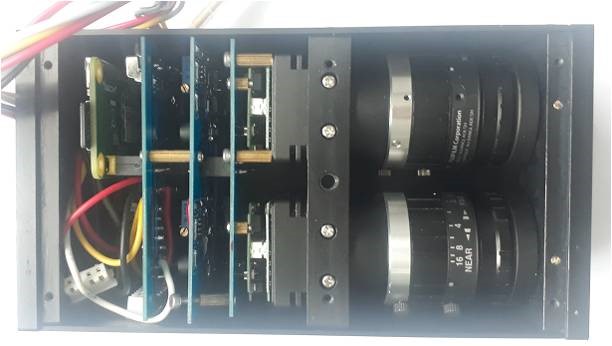
Sau khi căn chỉnh hệ thống thấu kính hoàn tất, tích hợp hệ thống thấu kính vào trong hệ thống cơ khí. Các kính lọc tương ứng cũng được tích hợp vào thành phần cơ khí tương ứng (xem Hình 3). Sau đó, các khối điện từ đã được chế tạo cũng được vào vào khối cơ khí (xem Hình 4).
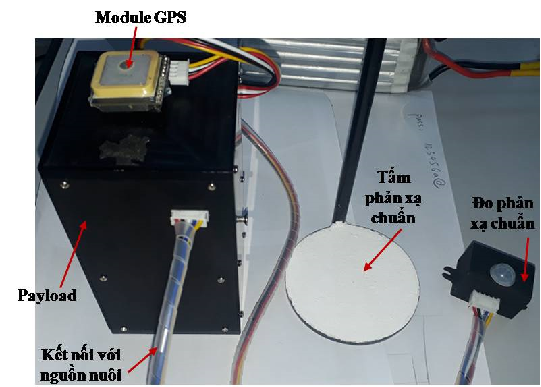
Các khối điện tử được tích hợp cùng với hệ thống quang học bao gồm khối CCD, khối khuếch đại và ADC, khối điều khiển trung tâm, khối nguồn và khối bộ nhớ. Khối bộ nhớ là một thẻ nhớ SD sẽ được kết nối với khối trung tâm qua một khe cắm ở bên ngoài. Người sử dụng có thể cắm hoặc lấy ra thẻ nhớ SD ở bên ngoài payload một cách dễ dàng. Khối GPS & IMU, đo phản xạ chuẩn được kết nối với payload quang học qua đường dẫn bên ngoài (xem Hình 5).
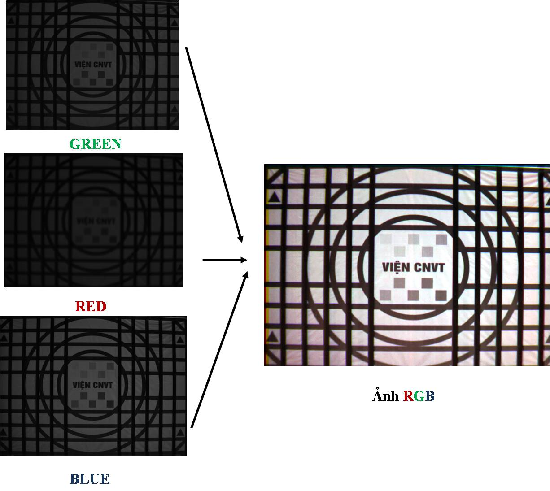
Ảnh đã được căn chỉnh có thể được xử lý với các phần mềm viễn thám phổ biến khác như ENVI. Một thử nghiệm vởi ảnh phổ chụp từ tấm mẫu được tiến hành. Bốn ảnh phổ của tấm mẫu sẽ được chỉnh sửa theo các giá trị của các hệ số căn chỉnh theo trục X và Y bằng phần mềm căn chỉnh. Hình 6 biểu diễn 3 ảnh phổ sẽ được căn chỉnh và tổ hợp 3 kênh RGB.
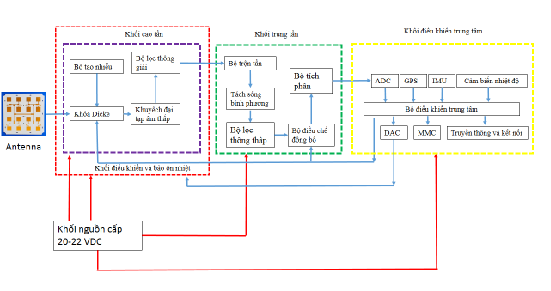
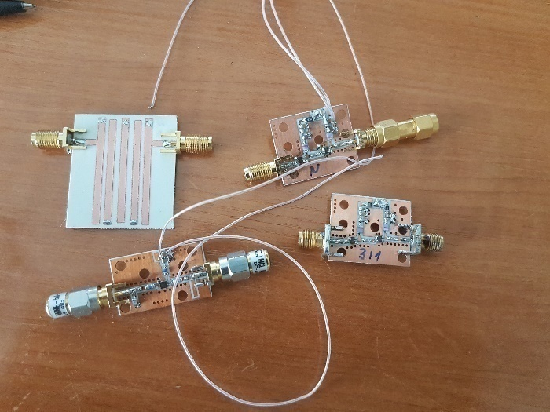
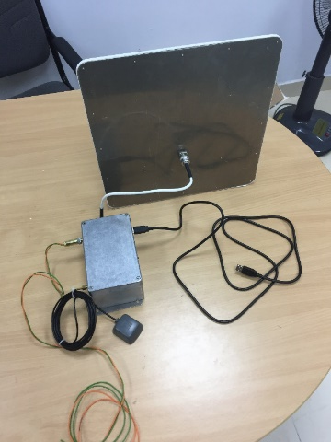
Một PKSCT băng L có ba khối chức năng chính là khối cao tần, khối trung tần và khối điều khiển trung tâm. Một ăng-ten đóng vai trò là khối nhận tín hiệu vào và gửi đến khối cao tần. Bao quanh khối cao tần là một khối điều khiển và bảo ôn nhiệt.
Hình 11. Phổ kế siêu cao tần băng L
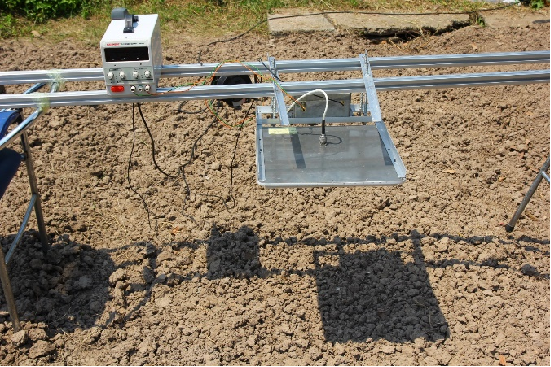
Hình 12. Thử nghiệm phổ kế siêu cao tần băng L ngoài thực địa |