|
1. Thiết kế, chế tạo và lắp đặt bệ hexapod định hướng anten bám theo vệ tinh
Kết cấu Hexapod là tay máy song song kiểu Stewart–Gough Platform có 6 bậc tự do được cấu tạo bởi một mặt phẳng nền (base platform), tấm chuyển động (payload platform) và 6 chân dẫn động. Các chân dẫn động này có khả năng thay đổi chiều dài và kết nối với hai mặt phẳng thông qua các khớp nối (khớp cầu hoặc khớp các đăng) tại các đầu cuối. Kết cấu này có ưu điểm là khả năng chịu tải lớn, độ cứng vững cao và khả năng thực hiện các thao tác phức tạp.
Kết cấu hexapod sử dụng để định hướng anten bám theo vệ tinh quan sát Trái đất tầm thấp (độ cao 600-800km) được thiết kế bao gồm 6 chân dẫn động có thể thay đổi được độ dài một cách chính xác bằng các động cơ AC Servo có mã hóa vị trí. Việc thay đổi đồng bộ và chính xác các khoảng cách của các chân dẫn động làm thay đổi hướng của tấm chuyển động phía trên, hay là thay đổi hướng của anten đặt trên đó. Việc tính toán độ dài mong muốn của các chân đảm bảo định hướng anten theo góc ngẩng và góc phương vị được tính toán bằng các giải các bài toán động học và điều khiển đồng bộ bởi các thuật toán điều khiển chuyên dụng. Giải pháp thiết kế của kết cấu hexapod đảm bảo khả năng chủ động chế tạo trong nước, giảm chi phí và phục vụ tốt công tác đào tạo và ứng dụng.
Kết cấu hexapod để định hướng anten theo vệ tinh quan sát Trái đất được thiết kế có chiều cao trung bình là 3000m, hành trình của mỗi chân dẫn động tối đa là 1300mm đảm bảo khả năng điều khiển bám theo vệ tinh trong vùng lên lạc của trạm mặt đất.

Hình 1. Kết cấu hexapod để định hướng anten bám theo vệ tinh.
Một số chỉ tiêu kỹ thuật cơ bản:
- Chiều cao trung bình: 3000mm
- Hành trình tối đa của chân: 1300mm
- Khối lượng: 500kg
- Khả năng chịu tải: lên đến 200kg.
- Khả năng chỉ hướng: góc ngẩng và góc phương vị.
2. Thiết kế, chế tạo và tích hợp hệ thống cao tần thu nhận tín hiệu vệ tinh băng S
Hệ thống cao tần để thu nhận tín hiệu vệ tinh quan sát Trái đất được thiết kế bao gồm anten và bộ thu và khuếch đại tạp âm thấp. Hệ thống này thu nhận tín hiệu vệ tinh tại băng tần S và đầu ra của hệ thống là tín hiệu trung tần (IF).
Hệ thống cao tần thu tín hiệu vệ tinh quan sát Trái đất ở băng tần S có các bộ phận sau đây:
1) Anten băng S:
Đề tài đã hoàn thành chế tạo và lắp đặt 02 chủng loại anten băng S có khả năng thu nhận tín hiệu vệ tinh quan sát Trái đất ở băng tần S, bao gồm:
Anten mảng phản xạ băng S, có các chỉ tiêu kỹ thuật cơ bản sau đây:
- Chủng loại: anten mảng phản xạ
- Chức năng: thu nhận tín hiệu vệ tinh ở dải tần số: 2,0 đến 2,5 GHz (Tần số trung tâm 2,240GHz)
- Kích thước: ~ 1.2 m×1.2 m
- Khối lượng: dưới 20kg
- Hệ số tăng ích: ~ 25 dBi
- Phân cực: Tròn về bên trái (LHCP)
- Búp sóng: ~ 7 độ
Anten parabol băng S, có các chỉ tiêu kỹ thuật sau đây:
- Chủng loại: chảo phản xạ
- Dải tần số hoạt động: 2.0 đến 5.0GHz
- Đường kính mặt phản xạ: 3m
- F/D: 0.45
- Vị trí lắp đặt bộ thu sóng: tiêu điểm
- Hệ số tăng ích: ~30db (Tại tần số 2,240GHz)
- Khối lượng: <70kg
- Bộ thu sóng: tần số trung tâm 2,240GHz, phân cực tròn trái (LHCP) và tròn phải (RHCP)
 |
 |
| Anten mảng phản xạ băng S |
Anten parabol băng S |
Hình 2. Các anten băng S đã được chế tạo và lắp đặt
2) Thiết kế và chế tạo khuếch đại tín hiệu tạp âm thấp:
Bộ thu và khuếch đại tín hiệu tạp âm thấp được thiết kế và chế tạo bao gồm các mạch điện tử cao tần và điều khiển số nhằm mục đích khuếch đại tín hiệu cao tần thu nhận được từ anten băng S và hạ tần xuống tín hiệu trung tần là 70Hz. Các chỉ tiêu kỹ thuật của bộ thu và khuếch đại tín hiệu tạp âm thấp như sau:
- Dản tần số hoạt động: 2200 đến 2300MHz
- Hệ số khuếch đại: >40db
- Hệ số tạp âm nhiệt: <1.2
- Nguồn cung cấp: 24VDC
- Dòng điện tiêu thụ: <500mA
- Kiếu kết nối đầu vào: 50Ω / N-female
- Kiếu kết nối đầu ra: 50Ω / N-female
- Kích thước: 250 x 110 x 44 mm
- Tần số dao động nội: 2310MHz
- Tần số trung tần đầu ra: 70MHz
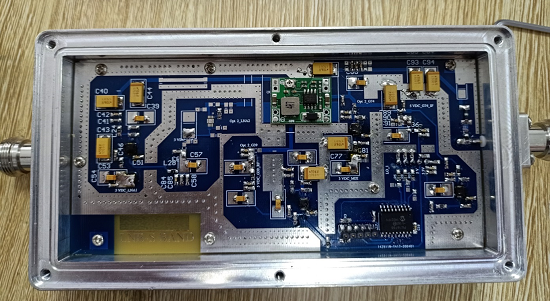
Hình 3. Bộ thu và khuếch đại tín hiệu tạp âm thấp.
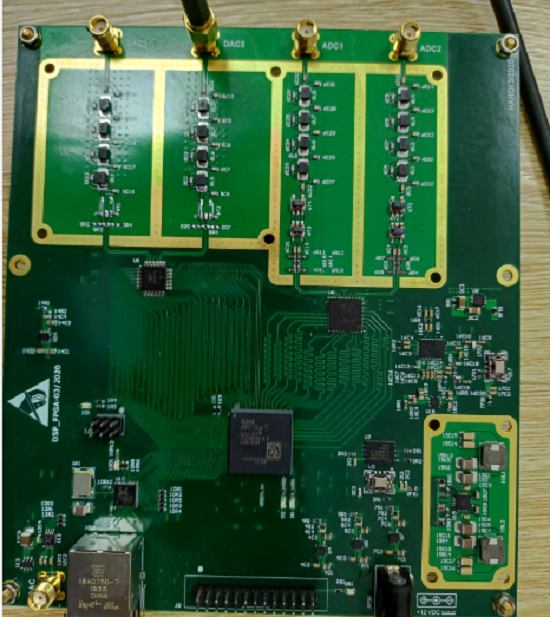
3) Thiết kế và chế tạo bộ xử lý tín hiệu:
Bộ xử lý tín hiệu analog có chức năng thu nhận và xử lý tín hiệu trung tần từ bộ LNB, lọc và đưa ra mức tín hiệu. Các chỉ tiêu kỹ thuật cơ bản như sau:
- Tần số tín hiệu đầu vào: trung tần tại 70Mhz
- Tốc độ lấy mẫu: 250 MSPS
- Dải thông: 170MHz
- Đầu ra: tín hiệu trung tần IF và mức tín hiệu.
Hình 4. Bộ xử lý tín hiệu và thử nghiệm với LNB
3. Phát triển hệ thống điều khiển hexapod bám theo vệ tinh quan sát Trái đất
Bộ điều khiển hexapod bao gồm hệ thống phần cứng và phần mềm thực hiện chức năng chính là điều khiển đồng bộ 6 chân dẫn động của kết cấu hexapod để định hướng anten bám theo vệ tinh quan sát Trái đất với các thông số quỹ đạo biết trước. Đề tài đã thử nghiệm với vệ tinh VNREDSat-1. Các thông số kỹ thuật của bộ điều khiển hexapod như sau:
- Chức năng: điều khiển đồng bộ 6 trục.
- Tính toán vị trí của vệ tinh dựa trên các thông số quỹ đạo để đảm bảo định hướng anten chính xác và thu được tín hiệu ở mức cao nhất.
- Tính toán và điều khiển kết cấu hexapod bằng cách giải bài toán động học để tính toán vị trí của các chân tương ứng với hướng của anten mong muốn (góc ngẩng và góc phương vị).
- Sai số điều khiển hướng: 0,1 độ
- Tốc độ điều khiển: tối đa 6 độ/giây.
- Dải góc điều khiển:
+ góc ngẩng: 0,5-179,5 độ
+ góc phương vị 0-360 độ
- Các chế độ làm việc: chế độ chờ, chế độ an toàn, chế độ bám theo quỹ đạo, quét hình nón.
- Các chức năng điều khiển thủ công: đặt vị trí anten, thử nghiệm chức năng cơ bản.
- Lưu trữ dữ liệu hoạt động của hệ thống.
- Phát hiện, cảnh báo các sự cố.
Hệ thống điều khiển hexapod được kết nối đồng bộ với hệ thống anten bám theo vệ tinh.

Hình 5. Hệ thống điều khiển hexapod bám theo vệ tinh quan sát trái đất.
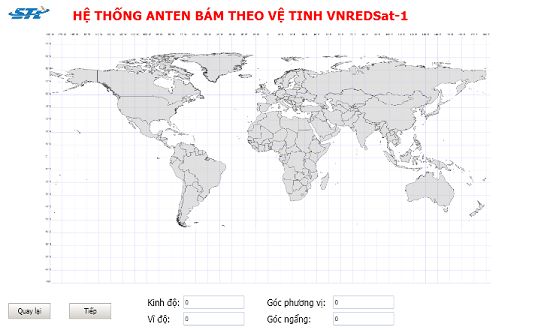 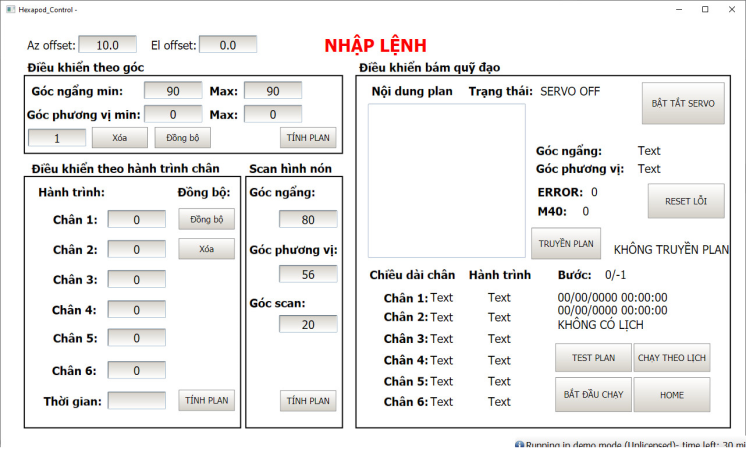
Hình 6. Giao diện phần mềm của hệ thống điều khiển hexapod
4. Hệ thống anten bám kiểu hexapod cho vệ tinh quan sát Trái đất
Hệ thống anten bám kiểu hexapod cho vệ tinh quan sát Trái đất là sản phẩm được tích hơp từ 03 cấu phần nêu trên thành một hệ thống hoàn chỉnh. Sơ đồ khối cua hệ thống được mô tả trong hình 6.
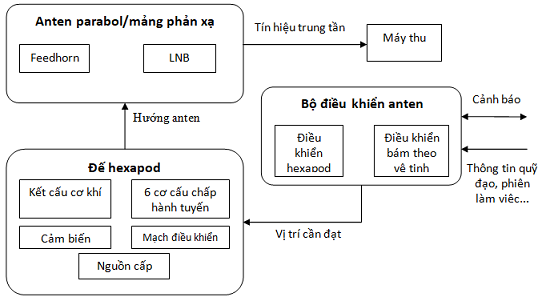
Hình 7. Sơ đồ hệ thống anten bám theo vệ tinh sử dụng kết cấu hexapod
Mô tả hệ thống như sau:
Kết cấu hexapod có gắn anten băng S ở tấm di động có chức năng định hướng anten theo hướng mong muốn được định nghĩa bằng bộ giá trị góc ngẩng và góc phương vị.
Hệ thống điều khiển hexapod thực hiện chức năng điều khiển và giám sát hệ thống. Hệ thống điều khiển này nhận thông tin đầu vào chủ yếu là các thông số quỹ đạo của vệ tinh và thời gian làm việc, từ đó tính toán và điều khiển hướng của anten theo hướng tức thời của vệ tinh.
Nguyên lý điều khiển hệ thống hexapod bám vệ tinh được thiết kế đảm bảo cho hệ thống 06 động cơ servo hoạt động đồng bộ để dịch chuyển hướng của anten (theo cả 2 góc phương vị và ngẩng) hướng đúng về vị trí vệ tinh.
Hình 8. Hệ thống anten bám kiểu hexapod cho vệ tinh quan sát Trái đất (lắp đặt và thử nghiệm với vệ tinh VNREDSat-1 tại Hòa Lạc với anten mảng phản xạ và anten parabol băng S). Hệ thống trên sử dụng nguồn điện 380VAC/3 pha 10KVA.
4. Bài báo và sách chuyên khảo đã công bố
4.1. Bài báo trên các kỷ yếu quốc tế trong hệ thống ISI/Scopus:
[1]. Ngo Duy Tan, Le Ngoc Giang, Nguyen Duc Viet, “Modelling and simulation of a hexapod antenna system for tracking VNREDSAT-1 satellite”, IEEE Explorer, 08/2020
DOI: 10.1109/EEEIC/ICPSEurope49358.2020.9160586, Scopus.
4.2. Các báo cáo trên tạp chí trên tạp chí trong nước và quốc tế
[1]. Ngô Duy Tân, Đặng Quốc Đại, Vương Huy Hoàng, “Nghiên cứu và thiết kế bệ đỡ kiểu hexapod cho hệ thống anten bám theo vệ tinh nhỏ quan sát Trái đất”, Tạp chí Tự động hóa ngày nay, Số 218-4/2019.Tr.28 – 30, ISSN 1859-0551
[2]. Ngo Duy Tan, Truong Tuan Anh và nnk, “Research and Development of a Hexapod Tracking Controller for VNREDSat-1 Satellite”, International Journal of Scientific Research and Engineering Development, Vol 4, Issue 3 May-June 2021, ISSN 2581-7175
4.3. Các bài báo tham gia Hội nghị Khoa học trong nước và quốc tế
[1]. Ngo Duy Tan, Le Ngoc Giang, Nguyen Duc Viet, “Modelling and simulation of a hexapod antenna system for tracking VNREDSAT-1 satellite”, 2020 IEEE International Conference on Environment and Electrical Engineering and 2020 IEEE Industrial and Commercial Power Systems Europe, EEEIC / I and CPS Europe 2020, Madrid, Spain, 9-12/6/2020.
[2]. Ngô Duy Tân, Bùi Trọng Tuyên, Phạm Minh Tuấn và nnk, “Nghiên cứu và phát triển hệ thống phần mềm điều khiển ăng-ten bám theo vệ tinh sử dụng kết cấu hexapod”, Hội nghị Khoa học kỷ niệm 45 năm thành lập Viện Hàn lâm KH&CN Việt Nam, Hà Nội, 14/10/2020.
5. Phát minh sáng chế
- Đã đăng ký và công bố 01 giải pháp hữu ích: “Phương pháp điều khiển bệ hexapod định hướng anten bám theo vệ tinh nhỏ quan sát trái đất trên quỹ đạo cực”, Đã công bố trên Công báo Sở hữu công nghiệp , ISSN 0868-2534, 6/2020.
6. Kết quả tham gia đào tạo
6.1. Tiến sĩ
[1]. Ngô Duy Tân, đề tài luận án: “Ước lượng tư thế vệ tinh nhỏ quan sát trái đất bằng việc hợp nhất hóa dữ liệu của cảm biến tốc độ góc và cảm biến sao”, ngành Kỹ thuật điều khiển và tự động hóa, năm bảo vệ: 2018.
Người hướng dẫn khoa học:
1. PGS.TS Thái Quang Vinh, Viện Công nghệ thông tin
2. TS. Bùi Trọng Tuyên, Viện Công nghệ vũ trụ
6.2. Thạc sĩ
[1]. Đặng Quốc Đại, đề tài luận văn “Thiết kế và mô phỏng kết cấu hexapod ứng dụng cho hệ thống bám anten của vệ tinh nhỏ quan sát Trái đất”, ngành Tự động hóa (2019).
Người hướng dẫn khoa học:
1. TS. Nguyễn Trần Hiệp, Học viện KTQS
2. TS. Ngô Duy Tân, Viện Công nghệ vũ trụ
[2]. Huỳnh Quang Trung, đề tài luận “Nghiên cứu thiết kế hệ thống giám sát điều khiển từ xa tích hợp thiết bị gateway IoT ứng dụng trong sản xuất điện”, ngành Kỹ thuật Điều khiển và Tự động hóa (2021).
Người hướng dẫn khoa học:
1. TS. Vũ Duy Thuận, Đại học Điện lực
2. TS. Ngô Duy Tân, Viện Công nghệ vũ trụ
7. Tình hình chuyển giao công nghệ
Đang xúc tiến tìm kiếm đối tác chuyển giao các kết quả của đề tài.
8. Kết quả của đề tài được lưu trữ tại
- Viện Công nghệ vũ trụ
- Văn phòng Chương trình KHCN Vũ trụ, Viện Hàn lâm Khoa học và Công nghệ Việt nam
- Cục thông tin khoa học và công nghệ Quốc gia.
|